Aplikasi Mikroprosessor dan Mikrokontroler

1. Bahtiar, Y.A. et al. (2019) ‘Pemilah Organik dengan Sensor Inframerah Terintegerasi Sensor Induktif dan Kapasitif’, Jurnal EECCIS, 13(3), pp. 109–113.
2. Ayutantri, D.A., Dedy Irawan, J. and Wibowo, S.A. (2021) ‘PENERAPAN IoT (Internet of Things) DALAM PEMBUATAN TEMPAT SAMPAH PINTAR UNTUK RUMAH KOS’, JATI (Jurnal Mahasiswa Teknik Informatika), 5(1), pp. 115–124. Available at: https://doi.org/10.36040/jati.v5i1.3263.
3. Sutarti, Siswanto and Mulyanto, J. (2020) ‘Purwarupa Tempat Sampah Pintar Berbasis Arduino Uno’, Dinamika Informatika, 9(2), pp. 1–15.
4. Al Mubarok, F.R. et al. (2018) ‘Tempat Sampah Otomatis Berbasis Arduino’, Politeknik Harapan Bersama [Preprint], (09).
5. Yunus, M. (2018) ‘Rancang Bangun Prototipe Tempat Sampah Pintar Pemilah Sampah Organik Dan Anorganik Menggunakan Arduino’, Proceeding STIMA, 1(1), pp. 340–343.
1. Tong sampah akan terbuka secara otomatis yang dideteksi oleh sensor ultrasonic
2. pemilahan sampah dilakukan otomatis oleh sensor ultrasonic dan ir proximity induktif dan kapasitif
5. terdapat indikator buzzer sebagai bunyi apabila sampah penuh dengan menggunakan sensor ultrasonic

Power supply atau yang juga dikenal dengan nama catu daya merupakan sebuah rangkaian elektronika yang digunakan sebagai penyedia sumber energi listrik untuk perangkat-perangkat elektronika dalam hal ini energi listrik tegangan DC.
Pada khayalak umum, nama power supply biasa dikenal dengan nama adaptor. Komponen utama dari power supply pada umumnya antara lain :
- Transformator atau trafo : sebagai penurun tegangan, misal tegangan AC 220 VAc menjadi AC 12 VAc
- Dioda : sebagai penyearah, dan sering digunakan dioda bridge (satu komponen terdiri dari 4 komponen diode sebagai penyearah tegangan)
- Kapasitor jenis ElCo (Elektrolit Condesator) : Sebagai filter atau penyaring guna meredam tegangan ripple pada rangkaian power supply
- Transistor : sebagai penstabil tegangan
Prinsip Kerja dari Power Supply
Dari dioda terhubung ke kapasitor atau ElCo yang berperan sebagai penyaring tegangan ripple yang masih bocor. Dan terdapat transistor yang berfungsi sebagai penstabil tegangan, dan output dari tegangan tersebut dapat dihubungkan ke perangkat elektronika lainnya. Apabila menginginkan output yang bervariasi misalnya power supply dengan output tegangan 5 VDC, 12 VDC, maupun 12 VDC bisa dipilih keluaran dari output dengan sakelar switching pada transformator. Dikarenakan pada umumnya, transformator yang dijual pada pasaran terdapat beberapa tegangan output sekaligus. Sehingga mudah dalam menentukan akan kebutuhan tegangan DC yang akan digunakan. Input yang diterima oleh rangkaian power supply berupa tegangan AC yang sudah diturunkan tegangannya melalui transformator (trafo) contoh kasus tegangan PLN 220VAc menjadi 12VAc. Setelah itu, terdapat dioda yang bertugas menyearahkan tegangan AC menjadi DC sehingga dari 12VAC menjadi 12VDC.

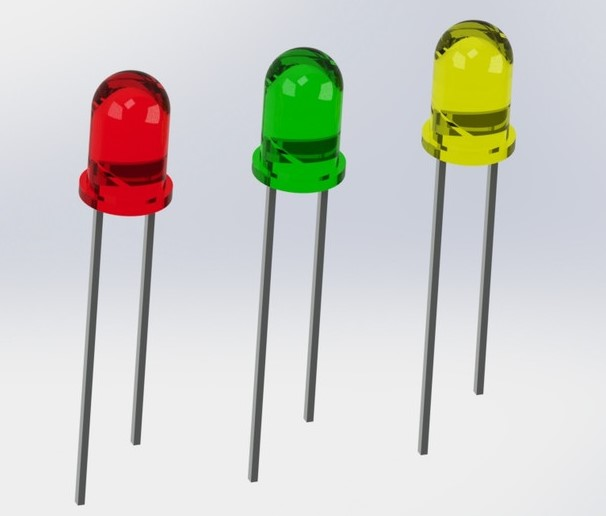
LED merupakan istilah yang berasal dari singkatan Light Emitting Diode. Komponen tersebut terbuat dari bahan yang bersifat semi konduktor, serta masih termasuk dalam kategori dioda. Sebagai komponen elektromagnetik, LED dapat memancarkan sinyal monokromatik melalui tegangan bias maju. Meskipun dapat menghasilkan cahaya, namun pada LED tidak seperti lampu pijar lainnya. Meskipun berfungsi untuk menghasilkan cahaya, namun tidak menimbulkan panas karena LED tidak menggunakan pembakaran filamen.

Berdasarkan bentuknya, LED memiliki tampilan yang sama seperti bohlam lampu pijar. Komponen tersebut juga dapat menghasilkan cahaya dengan aneka warna yang tergolong berbeda. Nah beragam warna yang dihasilkan oleh LED ini berasal dari bahan semikonduktor yang terdapat pada alat tersebut. Dimana beragam bahan yang bersifat semikonduktor ini difungsikan sebagai salah satu pembentuk LED. Cara kerjanya yakni dengan membuat alat tersebut dapat memancarkan aneka cahaya dengan beragam warna. Misalnya seperti merah, hijau, biru dan lain warna lainnya.

1. Miniature LED

Seperti namanya, jenis miniature LED ini bisa dikatakan mempunyai ukuran paling kecil dari jenis lainnya. Penggunaannya biasanya hanya diaplikasikan untuk hiasan atau keperluan dekorasi saja.
2. Bicolor LED

3. Super Flux LED

uper flux LED merupakan jenis LED yang memiliki 2 kutub positif dan juga 2 kutub negatif. Oleh karenanya, LED tersebut biasanya menggunakan konsumsi listrik yang relatif tinggi. Untuk penggunaannya, super flux LED sering dipakai untuk beberapa keperluan. Diantaranya yakni untuk penerangan jalan, papan iklan, reklame dan lain sebagainya.

5. COB LED

COB LED (Chip On Board LED) merupakan jenis LED yang dalam satu papan terdiri dari banyak sekali chip. Karena memiliki banyak chip, maka tingkat cahaya yang dihasilkan oleh lampu LED tersebut lebih terang dan merata. COB LED bisa dibilang sebagai perbaikan dari jenis LED yang sebelumnya, yakni SMD LED. Sebagai versi yang lebih baik, COB LED memiliki beberapa keunggulan. Diantaranya seperti memiliki penyebaran cahayanya yang lebih merata, lampu tidak cepat panas, dan lain sebagainya.
6. HIGH POWER LED

high power LED ini dapat menghasilkan cahaya dengan intensitas yang lebih tinggi dibandingkan dengan LED yang lainnya. Namun meskipun demikian, tipe high power LED ini cenderung lebih mudah panas. Hal ini karena kemampuannya menghasilkan cahaya yang lebih intens daripada LED biasanya. Untuk penggunaannya, high power LED bisa ditemukan di jalanan umum. Baik untuk penerangan ataupun lampu pada papan iklan dan reklame. Agar tidak terjadi overheating, jenis lampu LED tersebut sangat cocok untuk digabungkan dengan sistem tenaga surya.
Berdasarkan warnanya, daya yang dimiliki oleh lampu LED dibedakan menjadi beberapa poin berikut ini:
- Warna kuning yaitu lampu LED dengan daya 2,2 volt.
- Warna merah yaitu LED dengan daya 1,8 volt
- Warna hijau adalah lampu LED yang diproduksi dengan daya 3,5 volt.
- Warna biru digunakan untuk lampu LED dengan daya 3,6 volt.
- Warna putih untuk lampu LED daya 4,0 volt.
- Lampu inframerah LED memiliki data 1,2 volt.
FUNGSI LED
- LED digunakan untuk indikator dalam beberapa rangkaian elektronik.
- LED digunakan pada remot kontrol untuk sensor inframerah. Misalnya saja seperti lampu LED kecil yang digunakan pada remot AV player, TV, AC dan lain sebagainya.
- Pada alat-alat elektronik seperti televisi atau komputer, LED digunakan sebagai komponen untuk layar monitor.
- LED digunakan sebagai papan periklanan, reklame dan lain sebagainya.
- LED digunakan untuk backlight layar smartphone, TV, monitor dan lain-lain.
- LED digunakan untuk sarana penerangan outdoor, misalnya saja untuk memenuhi kebutuhan penerangan area rumah, penerangan jalan raya bahkan pada kendaraan tertentu.
- LED juga digunakan untuk keperluan dekorasi ruangan dan lain sebagainy
CARA KERJA LED
LED juga memiliki 2 buah kutub yakni kutub positif (P) dan negatif (N). Untuk dapat memancarkan cahaya, LED terlebih dahulu perlu dialiri oleh arus listrik. Pada rangkaian, arus listrik nantinya akan dialirkan dengan sistim bias maju yakni dari anoda ke katoda. Ketika hal tersebut terjadi, kelebihan elektron yang terdapat pada kutub negatif (N) akan berpindah pada tempat lain. Misalnya saja pada area yang memiliki muatan positif (P material). Setelah itu elektron akan bertemu dengan hole lalu melepaskan proton sehingga LED akan memancarkan cahaya dengan bentuk satu warna (monokromatik).

Terlebih dahulu lihatlah grafik sebelah kanan. Pilihlah terang LED yang diinginkan dan pakailah grafik ini untuk menentukan arus yang diperlukan. Sebagai contoh, Kita memilih intensitas luminous ( tingkat terang gelap sebuah LED ) sebesar 1, diketahui bahwa arus sebesar 20 mA yang diperlukan.
Ini bearti bahwa arus 20 mA harus melewati LED untuk mendapatkan terangnya LED sebesar 1. Sekarang, kita dapat menghitung jatuh tegangan pada LED berdasarkan arus yang diketahui. Lihatlah grafik sebelah kiri pada 20 mA. Sekarang kamu tahu bahwa jatuh tegangannya sebesar 1,85 V. Ketahuilah bahwa jatuh tegangan pada LED tidak hanya sebuah fungsi dari arus, tetapi juga warna LED dan suhu (disebabkan perbedaan zat kimia pada LED ).
c. Servo

Bagian-bagian motor servo adalah:
1. Housing.
Bagian yang pertama dari motor servo adalah housing. Dimana housing merupakan komponen yang fungsinya untuk melindungi motor dari partikel-partikel eksternal.
Housing sendiri biasanya terbuat dari bahan logam aluminium yang didesain secara berlapis. Desainnya juga dibuat sedemikian rupa sehingga nantinya dapat dibongkar dan dipasang dengan lebih mudah.
2. Bearing.
Bearing merupakan benda yang juga populer dengan sebutan laher. Bearing berfungsi untuk menjaga poros mesin agar tetap pada sumbunya. Selain itu, komponen ini juga berfungsi untuk menjadi tumpuan perputaran dari kedua benda tersebut.
Bearing juga berfungsi untuk mengurangi terjadinya gesekan angular sehingga dapat menghasilkan getaran yang rendah, namun tetap memiliki akurasi tinggi. Pada motor servo, bearing yang sedang beroperasi biasanya memiliki getaran yang halus dan tidak berisik.
3. Rotor.
Rotor merupakan komponen yang terletak di antara bagian poros motor, yaitu ditempatkan diantara dua bantalan.
Rotor adalah komponen motor servo yang bertugas untuk melakukan pergerakan. Jadi ketika mendapatkan tegangan, maka rotor akan bergerak dan melakukan perputaran.
4. Motor Shaft.
Motor shaft merupakan bagian yang fungsinya sebagai alat penggerak. Dimana komponen yang satu ini biasanya terbuat dari baja tempa.
Motor shaft bekerja dengan gearbox dan juga belt. Dengan adanya motor shaft, maka kecepatan pada motor dapat dikurangi dan torsinya dapat ditingkatkan.
5. Stator.
Stator menjadi bagian penting dari motor servo, fungsinya adalah sebagai stationer. Dimana stationer merupakan komponen yang berguna untuk menghasilkan medan magnet.
Komponen tersebut umumnya terdiri dari 12 lilitan yang akan dihubungkan pada kawat tembaga tunggal. Selain berfungsi untuk menghasilkan medan magnet, stator juga menjadi komponen yang bertugas untuk menghasilkan torsi.
6. Snap Ring.
Dengan adanya snap ring, maka kerusakan pada motor dapat dicegah atau setidaknya lebih terminimalisir. Snap ring sendiri merupakan komponen yang berfungsi untuk melindungi poros motor.
Dengan adanya komponen ini, maka poros motor tidak akan meluncur begitu saja. Selain itu juga dapat menghindar dari terjadinya tumbukan yang tidak diinginkan. Dengan demikian, kerusakan pada motor akan lebih dapat terminimalisir.
7. Rem.
Pada saat mesin dimatikan, maka motor servo akan ditahan menggunakan rem. Jadi komponen yang satu ini berfungsi untuk mengerem atau menahan agar motor tidak lepas kendali. Utamanya yakni begitu motor dalam kondisi e-stop yang menyala.
8. Bearing Keeper.
Bearing keeper merupakan komponen yang berfungsi untuk melindungi bearing. Jadi, kegunaannya adalah untuk mencegah agar bearing tidak mudah terlepas dari wadahnya.
9. O Ring.
Pada sebuah motor servo, Anda juga akan mendapati beberapa komponen O ring. Dimana O ring merupakan bagian yang fungsinya untuk seal atau penyekat.
Komponen O ring terbuat dari bahan plastik polimer, serta biasanya ditempatkan diantara dua bagian. Dengan adanya O ring, maka cairan yang berasal dari luar tidak akan mudah masuk ke dalam motor.
10. Encoder.
Sebagai perangkat elektromekanis, encoder fungsinya adalah untuk melakukan pengaturan kecepatan. Encoder atau yang dikenal juga dengan istilah detektor putaran ini merupakan komponen yang letaknya berada di bagian belakang mesin poros motor.
Encoder fungsinya untuk mendeteksi kecepatan dan juga posisi rotor. Dengan adanya econder, motor dapat menghasilkan resolusi tinggi dan juga respon yang cepat.
CARA KERJA SERVO
Untuk dapat bekerja, motor servo dikendalikan oleh komponen yang bernama econder. Jadi, econder menggunakan sinyal PWM untuk menentukan putaran poros dan juga sudut putaran dari servo. Ketika motor servo mendapatkan sinyal PWM, maka secara otomatis econder akan memutar poros motor untuk bergerak menuju posisi yang ditargetkan. Econder yang berperan sebagai potensiometer bertugas untuk mencari sudut paling tepat bagi posisi motor servo. Jadi sebelum terdeteksi sudut yang tepat, econder akan terus mencari dan mengarahkan poros motor sehingga ditemukan titik sudut yang benar. Ketika sudah dalam posisi yang tepat, maka sistem closed loop akan membuat sudut putaran poros berada dalam posisi tetap untuk beberapa waktu. Dengan begitu, walaupun mendapatkan gangguan dari luar, namun faktor internal servo akan mempertahankan agar posisi sudut tetap dalam kondisi diam untuk waktu tertentu. Namun posisi tersebut tidak berlangsung dalam waktu lama. Karena hanya berlaku sekitar 20 ms saja. Jadi, agar posisi porosnya tetap berada dalam posisi yang tepat. Motor harus diberi sinyal secara terus menerus. Cara kerja motor servo inilah yang disebut sebagai metode close loop. Dimana motor secara otomatis akan mencari sudut yang tepat dengan menggunakan teknik umpan balik. Hal ini juga menjadi kelebihan motor servo yang membedakannya dari jenis motor biasa.
JENIS JENIS MOTOR SERVO
1. BERDASARKAN PUTARAN
- Potensional Rotation
Jenis yang satu ini digunakan untuk motor yang memiliki putaran 180°. Yang menarik, motor jenis ini ternyata dapat diatur posisinya sesuai keinginan. Hal ini berlaku baik posisi searah jarum jam ataupun berlawanan dengan jarum jam. Pada motor yang menggunakan metode potensional rotation, juga terdapat komponen yang bernama gearbox. Dimana gearbox ini berfungsi untuk menentukan posisi sudut, serta mencegah putaran agar tidak melewati batas. Motor servo yang menggunakan sistem kerja dengan metode ini, biasanya diaplikasikan untuk beberapa keperluan. Salah satunya yaitu digunakan untuk penyusunan sistem robotik. Misalnya saja untuk lengan robot, lutut, dan juga bagian-bagian persendiannya.
- Linier Rotation
Linier rotation memiliki mekanisme yang hampir mirip dengan potensional rotation. Namun pada tipe linear, penggunaan gearbox yang dipakai sedikit berbeda. Dimana gearbox yang digunakan disini memakai mekanisme rack and pinion sehingga membuat gearbox tersebut dapat bergerak maju dan mundur. Motor tipe linier rotation penggunaannya cukup jarang. Karenanya pemakaiannya hanya digunakan pada jenis industri tertentu saja.
- Countinios Rotation
Jenis motor servo yang satu ini memiliki kelebihan, yaitu sudut putarannya yang dapat diatur hingga posisi 360°. Jadi, motor tersebut dapat diatur dengan fleksibel, serta dapat berputar ke segala arah. Meskipun sekilas cara kerjanya tidak beda jauh dengan motor biasa. Namun motor servo tetap memiliki kelebihan yang layak untuk dipertimbangkan. Salah satunya yaitu karena memiliki torsi dan tingkat keakuratan yang tinggi.
2. BERDASARKAN ARUS YANG DIGUNAKAN
- Motor Servo AC
Motor servo AC merupakan aktuator putar yang bekerja dengan menggunakan arus AC. Pada motor listrik tersebut, terdapat komponen yang bernama econder. Dimana econder merupakan alat yang berfungsi untuk mengontrol sistem kerja dari sebuah motor listrik. Econder memberikan kontrol loop tertutup, sehingga motor dapat menggunakan tegangan dan torsi yang lebih besar. Hasilnya, servo dapat menghasilkan akurasi dan juga toleransi yang tinggi. Karena spesifikasi yang dimilikinya, motor jenis AC ini biasanya digunakan untuk keperluan besar. Salah satunya yaitu dipakai untuk keperluan industri. Contoh pengaplikasiannya yakni umum dipakai untuk otomatisasi robotika, mesin CNC dan perangkat-perangkat lainnya yang membutuhkan tingkat akurasi tinggi.
- Motor Servo DC
Motor servo DC juga merupakan motor yang bekerja dengan menggunakan arus DC. Dibanding dengan yang sebelumnya, motor DC memiliki reaksi induktif amature yang rendah. Selain itu, daya, torsi dan baterai yang dimilikinya juga lebih kecil. Sehingga penggunaannya hanya dipakai untuk mesin-mesin sederhana. Misalnya seperti remote control, mainan anak dan lain-lain.

d. Arduino Uno

Arduino Uno adalah salah satu dari sekian jenis produk dari keluarga arduino yang papan elektroniknya memiliki mikrokontroler ATMega 328.
IC mikrokontroler di papan eletronik itu nantinya bertindak seperti layaknya sebuah komputer dikarenakan memiliki CPU, RAM, mapun ROM.
Dengan kata lain Arduino Uno merupakan board mikrokontroler berbasis ATmega328 (datasheet).
Ia memiliki 14 pin input dari output digital, dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset.
Agar mikrokontroler dapat digunakan,pengguna cukup menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Yang spesial dari Uno ini adalah dalam hal koneksi USB-to-serial yaitu menggunakan fitur Atmega8U2 yang diprogram sebagai konverter USB-to-serial.
Nama “Uno” berarti satu dalam bahasa Italia, untuk menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan menjadi versi referensi dari Arduino. Uno adalah yang terbaru dalam serangkaian board USB Arduino, dan sebagai model referensi untuk platform Arduino, untuk perbandingan dengan versi sebelumnya, lihat indeks board Arduino.
Spesifikasi Arduino Uno
– Mikrokontroler : ATMega32P
– Tegangan operasional pada 5 Vdc
– Tegangan masukan (rekomendasi) pada 7 – 12 Vdc
– Jumlah Digital I/O > 14 pin
– Jumlah analog Input > 6 pin
– Flash Memory 32 KB
– SRAM 2 KB
– eepROM 1 KB
– Clocking speed > 16 MHz
– Panjang papan elektronik > 68.6 mm
– Lebar papan elektronik > 53.4 mm
– Berat modul : 25 gr
Sementara Arduino Uno yang terbaru saat ini yakni R3 sudah memiliki fitur tambahan yakni:
– Pinout yang juga ditambah dengan pin khusus SDA dan SCL yang dekat dengan pin AREF dan 2 pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF. Untuk ke depannya, module shield kompatibel dengan board yang beroperasi dengan tegangan 5V.
– Rangkaian RESET yang lebih efektif
– Penggunaan Atmega 16U2 menggantikan Atmega 8U2
Daya Arduino Uno
Sumber daya Arduino UNO bisa berasal dari koneksi USB atau dengan sebuah power suplai eksternal. Sumber dayanya pun dipilih secara otomatis.
adapun persediaan tegangan eksternal (non-USB) diperoleh dari tegangan masukan adaptor DC dengan range minimal 6 – 20Vdc ataupun baterai.
Adaptor dihubungkan dengan mencolokkan sebuah jack plug DC yang panjangnya 2,1 mm ke power jack dari board. Sedangkan untuk baterai dapat dihubungkan menggunakan kabel jumper.
Pin daya yang terdapat pada Arduino Uno yakni:
– VIN yakni tegangan supply masuk sebesar 5V, sebagai pengganti daya dari USB maupun dari power supply jack DC.
– 5V yakni tegangan keluaran yang difungsikan catu daya untuk module, sensor, maupun shield
– 3V3 yakni tegangan keluaran khusus dengan output 3.3 v, yang difungsikan sebagai catu daya
– GND yakni pin ground baik untuk VIn, 5V, maupun 3V3
Memori
Papan Ic Arduino Uno jenis ATmega328 dilengkapi 32 KB (dengan 0,5 KB digunakan untuk bootloader), 2 KB dari SRAM dan 1 KB EEPROM (EEPROM liberary).
Input dan Output
Dalam perangkat ini, terdapat masing-masing 14 pin digital yang dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dan digitalRead (), beroperasi dengan daya 5 volt.
Masing-masing pin bisa memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default terputus) dari 20-50 kOhms. Ada juga beberapa pin yang mempunyai fungsi khusus yakni:
– Serial 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip Serial ATmega8U2 USB-to-TTL.
– Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih lanjut.
PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi analogWrite ().
SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan SPI library.
LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Uno memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
I2C: A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan perpustakaan Wire.
Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog. Digunakan dengan fungsi analogReference ().
Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
Fungsi Arduino Uno
Seperti layaknya papan elektronik Arduino Uno berfungsi membuat program untuk mengendalikan berbagai komponen elektronika.
Dan fungsi Arduino Uno ini dibuat untuk memudahkan pengguna dalam melakukan prototyping, memprogram mikrokontroler, membuat alat-alat canggih berbasis mikrokontorler.
Pemrograman Arduino Uno
Memprogram Arduino sangat mudah, karena sudah menggunakan bahasa pemrograman tingkat tinggi C++ yang mudah untuk dipelajari dan sudah didukung oleh library yang lengkap.
Arduino-Uno-project
Contoh Project dengan Arduino Uno
Arduino Uno digunakan dalam banyak project seperti:
– Lampu flip-flop, lampu Lalu-lintas
– Robot pintar; line follower, maze solver, pencari api, dll
– Mengontrol motor stepper,
– Mendeteksi suhu dan mengatur suhu ruang,
– Jam digital
– Timer alarm
– Display LCD, dan masih banyak lagi contoh yang lainnya.
e. Sensor ir proximity
Proximity Sensor tidak menggunakan bagian-bagian yang bergerak atau mekanis untuk mendeteksi keberadaan benda-benda di sekitarnya, tetapi menggunakan medan elektromagnetik atau radiasi elektromagnetik untuk menentukan apakah ada objek tertentu di sekitarnya. Jarak maksimum yang dapat dideteksi oleh sensor ini disebut “rentang nominal”. Beberapa sensor jarak juga memiliki fungsi untuk mengatur interval nominal dan melaporkan jarak objek yang terdeteksi.
Sensor Proximity ini umumnya digunakan untuk mendeteksi keberadaan, kedekatan, posisi dan mengandalkan mesin otomatis dan sistem produksi. Mesin yang menggunakan sensor kedekatan ini termasuk mesin pengemasan, mesin produksi, mesin cetak, mesin cetakan plastik, mesin pengerjaan logam, mesin pengolah makanan, dan banyak lainnya.
Inductive Proximity Sensor (Sensor Jarak Induktif)

Inductive Proximity Sensor atau sensor kedekatan induktif adalah sensor kedekatan yang digunakan untuk sensor kedekatan untuk mendeteksi keberadaan logam besi dan non-ferro.
Sensor ini dapat digunakan untuk mendeteksi ada (ada atau tidak adanya benda logam), menghitung benda logam dan aplikasi posisi. Sensor induktif sering digunakan sebagai ganti sakelar mekanis karena mereka dapat beroperasi pada kecepatan yang lebih tinggi daripada sakelar mekanis normal. Sensor jarak induktif juga lebih dapat diandalkan dan lebih kuat.
Sensor kedekatan induktif umumnya diproduksi dengan koil / inti ferit untuk menghasilkan medan elektromagnetik frekuensi tinggi. Output dari sensor proximity induktif ini dapat berupa analog atau digital. Versi analog dapat diaktifkan oleh tegangan (biasanya 0-10V DC) atau saat ini (4-20 mA). Jarak pengukuran bisa sampai 5 cm.
Sementara versi digital biasanya hanya digunakan di sirkuit DC atau AC. Kebanyakan sensor induktif digital dikonfigurasikan dengan output “NORMAL OPEN”, tetapi beberapa dengan output “NORMAL CLOSED”. Sensor induktif ini sangat cocok untuk mendeteksi benda logam dalam mesin dan perangkat otomasi

Capacitive Proximity Sensor (Sensor Jarak Kapasitif)

Sensor proximity capacitive adalah sensor proximity yang dapat merasakan gerakan, komposisi kimia, level fluida dan level tekanan dan komposisi. Sensor kedekatan kapasitif mampu mendeteksi bahan dielektrik rendah seperti plastik atau kaca dan bahan dengan dielektrik yang lebih tinggi seperti cairan, sehingga sensor jenis ini dapat menangkap tingkat banyak bahan melalui komposisi gelas, plastik, atau wadah lainnya.
Sensor kedekatan kapasitif ini secara substansial mirip dengan sensor kedekatan induktif, perbedaannya adalah bahwa sensor kapasitif menghasilkan medan elektrostatik sedangkan sensor induktif menghasilkan medan elektromagnetik. Sensor kedekatan kapasitif ini dapat digerakkan oleh bahan konduktif dan non-konduktif. Elemen aktif dari sensor proximity kapasitif terdiri dari dua elektroda logam yang diposisikan sesuai dengan kapasitor terbuka (sama).
Elektroda ini dimasukkan ke dalam rangkaian resonansi frekuensi tinggi. Ketika objek mendekati permukaan sensor proximity kapasitif, bidang elektrostatik dari pelat logam rusak, sehingga mengubah kapasitansi sensor proximity. Perubahan ini mengubah kondisi dalam pengoperasian sensor proximity sehingga keberadaan objek dapat dideteksi.

f. Sensor Ultrasonic
Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu.
Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik). Salah satu sensor ultrasonik yang paling sering dijumpai adalah HC-SR04.
Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat didengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba.
Bunyi ultrasonik dapat merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
Cara Kerja Sensor Ultrasonik
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut.
Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut.
Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.

Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
- Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi di atas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
- Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika sinyal menumbuk suatu benda, maka sinyal tersebut akan dipantulkan kembali oleh benda tersebut.
- Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut.
Jarak benda dihitung berdasarkan rumus :
S = 340 . t / 2
Dimana:
Aplikasi Sensor Ultrasonik Dalam Kehidupan
1. Bidang Kedokteran
Gelombang ultrasonik juga bermanfaat untuk diagnosis dan pengobatan dalam bidang kedokteran. Biasanya gelombang ultrasonik akan membantu untuk mendiagnosis berbagai penyakit yang dialami oleh pasien, contohnya penyakit tumor/ kanker.
Kita sering mendengar USG (Ultrasonografi) untuk ibu hamil agar dapat melihat janin dalam kandungannya.
2. Bidang Industri
Dalam bidang industri, gelombang ultrasonik digunakan untuk mendeteksi keretakan pada logam, meratakan campuran besi dan timah, meratakan campuran susu agar homogen, mensterilkan makanan yang diawetkan dalam kaleng, dan membersihkan benda benda yang sangat halus.
Gelombang ultrasonik juga bisa digunakan untuk mendeteksi keberadaan mineral maupun minyak bumi yang tersimpan di dalam perut bumi. Selain itu penggunaan sensor ultrasonik banyak ditemui di pabrik-pabrik, salah satunya sebagai pengukur level muatan pada tangki baik itu berupa zat cair maupun padat.
3. Bidang Militer
Dalam bidang militer, gelombang ultrasonik digunakan sebagai radar atau navigasi, di darat maupun di dalam air. Gelombang ultrasonik digunakan oleh kapal pemburu untuk mengetahui keberadaan kapal selam, dipasang pada kapal selam untuk mengetahui keberadaan kapal yang berada di atas permukaan air, mengukur kedalaman palung laut, mendeteksi ranjau, dan menentukan posisi sekelompok ikan.
4. Bidang Pertanian
Dalam bidang pertanian, sensor ultrasonik digunakan untuk memantau tanaman, aplikasi pupuk, pengukuran level, dan aplikasi lainnya. Sensor ultrasonik juga digunakan untuk memantau sistem irigasi untuk mencegah over watering dan under watering sebagai pencegahan terhadap kerusakan tanaman. Sensor ultrasonik juga digunakan untuk memantau dan mengontrol aplikasi insektisida, pupuk, dan pestisida.
Pestisida digunakan secara luas pada tanaman untuk memastikan kesehatan yang baik dan hasil yang maksimal. Sering kali, ini digunakan secara berlebihan, yang menyebabkan pemborosan. Adopsi sensor ultrasonik mendeteksi celah antara tanaman dalam baris untuk disemprot di tempat-tempat yang tidak ada tanaman.
5. Bidang Otomotif
Dalam bidang otomotif, aplikasi sensor ultrasonik yang umum sekarang ini adalah sistem keamanan saat berkendara pada mobil. Sensor ultrasonik akan mendeteksi rintangan dan memperingatkan bahkan mengerem sebelum kemungkinan terjadinya tabrakan di lingkungan lalu lintas yang padat.
Sensor tersebut ditempatkan pada bumper depan dan belakang sehingga membantu dalam menentukan kecepatan dan jarak melalui gelombang suara. Selain itu sensor ultrasonik juga digunakan pada sistem parkir mobil otomatis.
Rangkaian Sensor Ultrasonik
Sensor ultrasonik terdiri dari beberapa bagian. Berikut adalah rangkaian sensor ultrasonik.
1. Piezoelektrik
Piezoelektrik berfungsi untuk mengubah energi listrik menjadi energi mekanik. Bahan piezoelektrik adalah material yang memproduksi medan listrik ketika dikenai regangan atau tekanan mekanis. Sebaliknya, jika medan listrik diterapkan, maka material tersebut akan mengalami regangan atau tekanan mekanis.
Jika rangkaian pengukur beroperasi pada mode pulsa elemen piezoelektrik yang sama, maka dapat digunakan sebagai transmitter dan reiceiver. Frekuensi yang ditimbulkan tergantung pada osilatornya yang disesuaikan frekuensi kerja dari masing-masing transduser. Karena kelebihannya inilah maka tranduser piezoelektrik lebih sesuai digunakan untuk sensor ultrasonik.
2. Transmitter
Transmitter adalah sebuah alat yang berfungsi sebagai pemancar gelombang ultrasonik dengan frekuensi tertentu (misal, sebesar 40 kHz) yang dibangkitkan dari sebuah osilator. Untuk menghasilkan frekuensi 40 KHz, harus di buat sebuah rangkaian osilator dan keluaran dari osilator dilanjutkan menuju penguat sinyal.
Besarnya frekuensi ditentukan oleh komponen RLC / kristal tergantung dari desain osilator yang digunakan. Penguat sinyal akan memberikan sebuah sinyal listrik yang diumpankan ke piezoelektrik dan terjadi reaksi mekanik sehingga bergetar dan memancarkan gelombang yang sesuai dengan besar frekuensi pada osilator.
3. Receiver
Receiver terdiri dari transduser ultrasonik menggunakan bahan piezoelektrik, yang berfungsi sebagai penerima gelombang pantulan yang berasal dari transmitter yang dikenakan pada permukaan suatu benda atau gelombang langsung LOS (Line of Sight) dari transmitter.
Oleh karena bahan piezoelektrik memiliki reaksi yang reversible, elemen keramik akan membangkitkan tegangan listrik pada saat gelombang datang dengan frekuensi yang resonan dan akan menggetarkan bahan piezoelektrik tersebut.
Contoh Sensor Ultrasonik
Salah satu contoh sensor ultrasonik yang mudah dijumpai adalah HC-SR04. Sensor ini banyak digunakan karena harganya yang sangat terjangkau.Sensor ini merupakan sensor ultrasonik siap pakai, satu alat yang berfungsi sebagai pengirim, penerima, dan pengontrol gelombang ultrasonik. Alat ini bisa digunakan untuk mengukur jarak benda dari 2 cm - 4 m dengan akurasi sebesar 3 mm.
Alat ini memiliki 4 pin, pin VCC, GND, Trigger, dan Echo. Pin VCC untuk tegangan positif dan GND untuk ground-nya. Pin Trigger untuk trigger/pemicu keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.


g. Sensor pH
pH meter adalah alat yang digunakan untuk menentukan keasaman atau kebasaan dari suatu larutan. pH adalah konsentrasi ion hidrogen pada suatu larutan. Suatu larutan yang mengandung banyak ion H+ akan dalam suasana asam sedangkan suatu larutan mengandung lebih banyak ion OH– maka akan menjadi suasana asam. Kisaran rentang pH di kimia adalah dari 1-14. Suatu larutan dengan nilai pH 1 akan menjadi sangat asam dan dengan nilai pH 14 akan menjadi sangat basa. Keasaman dan kebasaan dari suatu larutan tergantung pada konsentrasi dari ion hidrogen (H+ ) dan ion OH–. Suatu larutan netral yang terdiri dari air murni mempunyai pH 7. pH meter hampir semuanya berbentuk digital dengan display angka pada alatnya yang menunjukkan nilai pH dan suhu larutan.
Prinsip kerja utama pH meter adalah terletak pada sensor probe berupa elektrode kaca (glass electrode) dengan jalan mengukur jumlah ion H3O+ di dalam larutan. Ujung elektrode kaca adalah lapisan kaca setebal 0,1 mm yang berbentuk bulat (bulb). Bulb ini dipasangkan dengan silinder kaca non-konduktor atau plastik memanjang, yang selanjutnya diisi dengan larutan HCl (0,1 mol/dm3). Di dalam larutan HCl, terendam sebuah kawat elektrode panjang berbahan perak yang pada permukaannya terbentuk senyawa setimbang AgCl. Konstannya jumlah larutan HCl pada sistem ini membuat elektrode Ag/AgCl memiliki nilai potensial stabil.

Inti sensor pH terdapat pada permukaan bulb kaca yang memiliki kemampuan untuk bertukar ion positif (H+) dengan larutan terukur. Kaca tersusun atas molekul silikon dioksida dengan sejumlah ikatan logam alkali. Pada saat bulb kaca ini terekspos air, ikatan SiO akan terprotonasi membentuk membran tipis HSiO+ sesuai dengan reaksi berikut:
SiO + H3O+ → HSiO+ + H2O


Seperti pada ilustrasi di atas bahwa pada permukaan bulb terbentuk semacam lapisan “gel” sebagai tempat pertukaran ion H+. Jika larutan bersifat asam, maka ion H+ akan terikat ke permukaan bulb. Hal ini menimbulkan muatan positif terakumulasi pada lapisan “gel“. Sedangkan jika larutan bersifat basa, maka ion H+ dari dinding bulb terlepas untuk bereaksi dengan larutan tadi. Hal ini menghasilkan muatan negatif pada dinding bulb.
Pertukaran ion hidronium (H+) yang terjadi antara permukaan bulb kaca dengan larutan sekitarnya inilah yang menjadi kunci pengukuran jumlah ion H3O+ di dalam larutan. Kesetimbangan pertukaran ion yang terjadi di antara dua fase dinding kaca bulb dengan larutan, menghasilkan beda potensial di antara keduanya.
Edinding kaca/larutan ≈ |RT/2,303F loga(H3O+)|
dimana R adalah konstanta molar gas (8,314 J/mol K), T untuk temperatur (Kelvin), F adalah konstanta Faraday 96.485,3 C/mol, 2,303 adalah angka konversi antara logaritma alami dengan umum, dan a(H3O+) adalah aktivitas dari hidronium (bernilai rendah jika konsentrasinya rendah). Pada temperatur 25°C nilai dari RT/2,303F mendekati angka 59,16 mV. Angka 59,16 mV ini menjadi bilangan penting karena pada suhu konstan larutan 25°C, setiap perubahan 1 satuan pH, terjadi perubahan beda potensial elektrode kaca sebesar 59,16 mV.

Perhitungan nilai aktivitas hidronium (a(H3O+)) pada persamaan di atas memiliki rentang yang sangat lebar yakni antara 10 hingga 10-15 mol/dm3. Sehingga untuk meringkas persamaan, maka lahirlah istilah pH dengan persamaan sebagai berikut:
pH = -log a(H3O+)
Tanda negatif adalah untuk membuat semua nilai pH dari berbagai larutan, kecuali larutan yang bersifat sangat ekstrim asam, menjadi bernilai positif.
Seperti yang telah kita bahas di atas, bulb kaca berisi larutan HCl yang merendam sebuah elektrode perak. HCl ini memiliki pH konstan karena ia berada pada sistem yang terisolasi. Karena pH konstan inilah maka ia menciptakan beda potensial yang konstan pada temperatur yang konstan pula. Sebut saja potensial tersebut bernilai E’, maka persamaan (Eq. 1) di atas bersama dengan persamaan (Eq. 2) didapatkan persamaan beda potensial total dari elektrode kaca:
Eelektrode kaca = E’ – RT/2,303F pH
…… Eq. 3

Pada sebuah sistem pH meter secara keseluruhan, selain terdapat elektrode kaca juga terdapat elektrode referensi. Kedua elektrode tersebut sama-sama terendam ke dalam media ukur yang sama. Elektrode referensi digunakan untuk menciptakan rangkaian listrik pH meter. Untuk menghasilkan pembacaan pH yang valid, elektrode referensi harus memiliki nilai potensial stabil dan tidak terpengaruh oleh jenis fluida yang diukur.
Seperti halnya elektrode kaca, di dalam elektrode referensi juga digunakan larutan HCl (elektrolit) yang merendam elektrode kecil Ag/AgCl. Pada ujung elektrode referensi terdapat liquid junction berupa bahan keramik sebagai tempat pertukaran ion antara elektrolit dengan larutan terukur, pertukaran ion ini dibutuhkan untuk menciptakan aliran listrik sehingga pengukuran potensiometer (pH meter) dapat dilakukan.









Tidak ada komentar:
Posting Komentar